Social robots are designed to
communicate with human beings naturally, assisting them with a variety of
tasks. The effective use of gestures could greatly enhance robot-human
interactions, allowing robots to communicate both verbally and non-verbally. Researchers
at Vrije Universiteit Brussel, in Belgium, have recently introduced a new
approach based on a generic gesture method to study the influence of different
design aspects. The method devised by this team of researchers could overcome
difficulties in transferring gestures to robots of different shapes and
configurations. Users can input a robot's morphological information and the
tool will use this data to calculate the gestures for that robot. To ensure
that their method would be applicable to different types of robots, the
researchers drew inspiration from a human base model. This model consists of
different chains and blocks, which are used to model the various rotational
possibilities of humans.
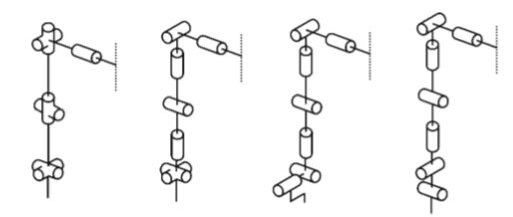
The researchers assigned a
reference frame to each joint block using the human base model as a reference
to construct the general framework behind their method. As different features
are important for different kinds of gestures, the method devised by the
researchers is designed to work in two different modes, namely the block mode
and end effector mode. The block mode is used to calculate gestures such as
emotional expressions in instances when the overall arm placement is crucial.
The end effector mode, on the other hand, calculates gestures in situations in
which the position of the end-effector is important, such as during object
manipulation or pointing. In their study, the researchers applied their method
to the virtual model of a robot called Probo. They used this example to
illustrate how their method could help to study the collocation of different
joints and joint angle ranges in gestures.
More information: